About Me
I'm a software engineer at Apple, working on computer vision, multimodal large language models, and efficient neural network architectures. My focus lies at the intersection of research and engineering — creating and optimizing models that can run efficiently on-device, with an emphasis on real-world scalability and performance.
Previously, I was part of HD Maps team within the Special Projects Group (SPG), where I designed and implemented high-performance spatial algorithms in C++.
I co-developed a lightweight, header-only C++ geometry and matrix library that became a core dependency across SPG's real-time and offline pipelines.
In addition, I led the development of a vehicle routing library and service that generates globally optimized data collection routes — a key component powering Apple Maps data collections.
I studied Electrical Engineering and Computer Sciences at University of California, Berkeley where I earned both of my B.S and M.S degrees.
My focus was on Computer Vision, Machine Learning and Robotics. During my time there, I worked as an undergraduate researcher at Biomimetic Millisystems Lab under Prof. Ronald S. Fearing and Dr. Carlos S. Casarez.
Feel free to contact me for an updated version of my resume.
Patents
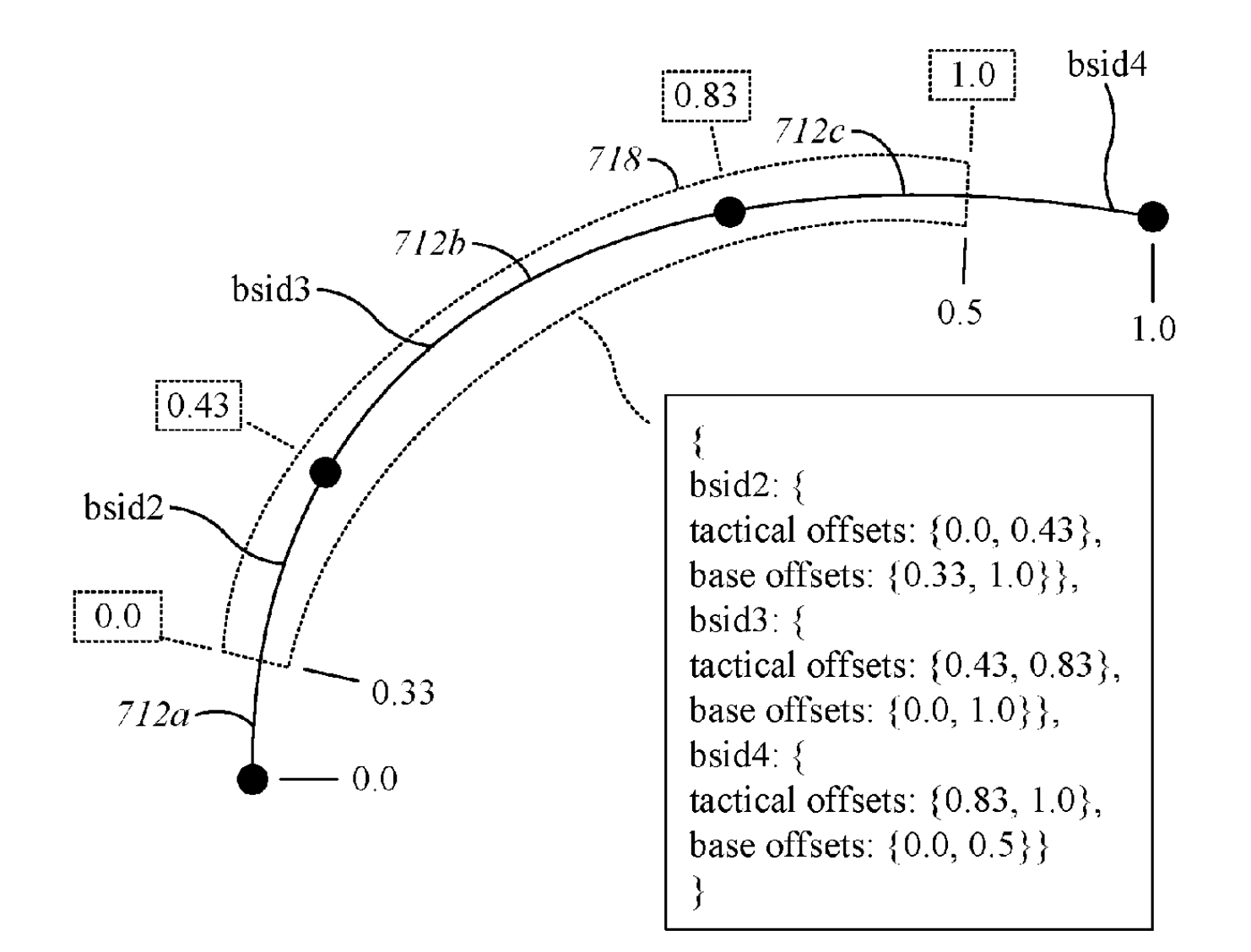
Offline Registration of Elements Between Maps
Mike Tsoupko-Sitnikov, Can Koc, Marlene Wan, Lukas Marti
A method includes obtaining a first map element from a first map, identifying second map elements from a second map based on locations of the second map elements relative to the first map element, and identifying first and second point on the second map elements based on proximity to beginning and ending points of the first map element. One or more of the second map elements define a corresponding portion of the second map between the first point and the second point. The method also includes determining a registration score for the first map element relative to the corresponding portion of the second map, and in response to determining that the registration score indicates a match between the first map element and the corresponding portion of the second map, defining registration information that describes a relationship between the first map element and the corresponding portion of the second map.
Research & Publications
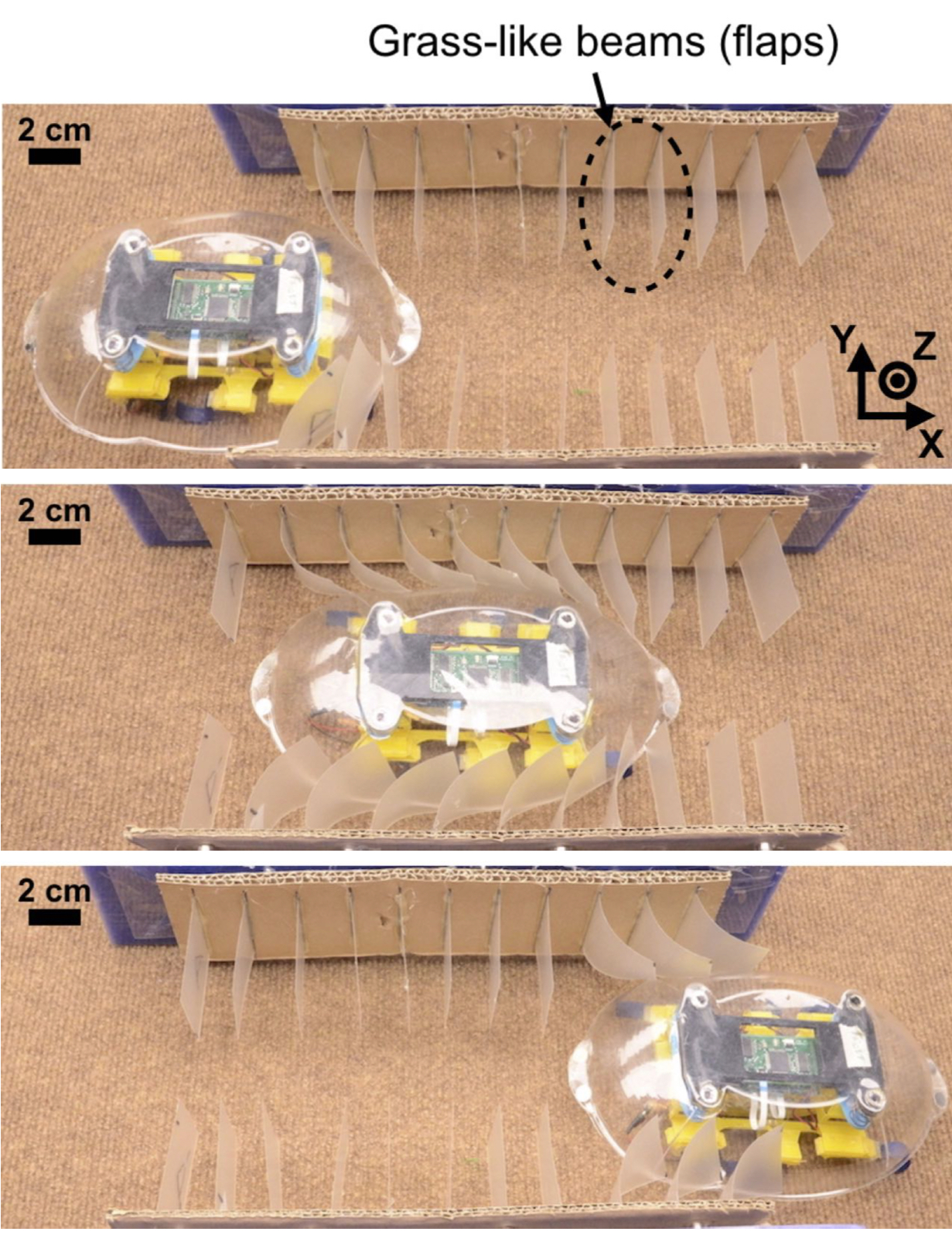
Body Lift and Drag for a Legged Millirobot in Compliant Beam Environment
Can Koc*, Cem Koc*, Brian Su*, C. S. Casarez and R. S. Fearing, "Body Lift and Drag for a Legged Millirobot in Compliant Beam Environment," ICRA 2019
We modeled the drag and lift forces around a millirobot with a tactile shell attached and drew conclusions on cost of transport required to efficiently go through a cluttered environment.

Terrain Classification Using a Tactile Sensing Shell
Can Koc*, Cem Koc*, Brian Su*, Ronald S. Fearing
BARS 2016
We used a milli robot with a tactile sensing shell attached to classify different resistance zones.
Projects

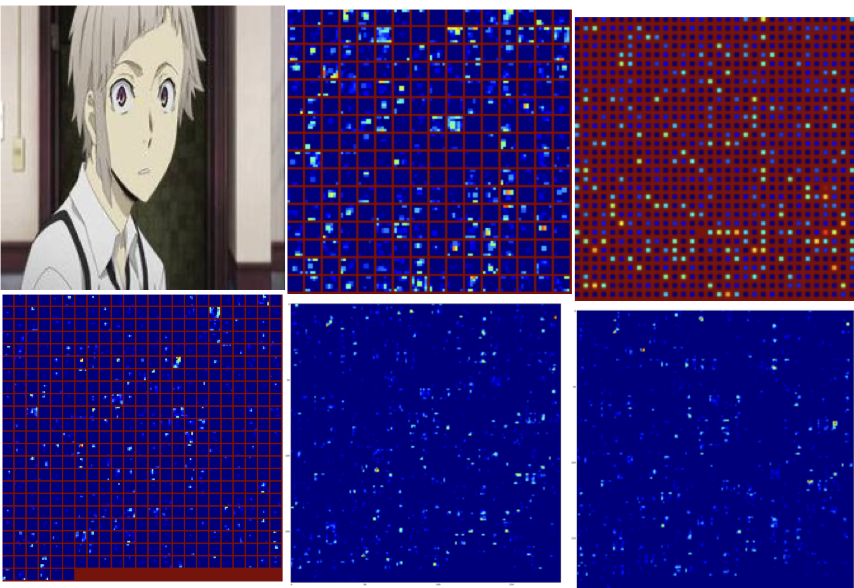
CellViT: Vision Transformer for Cell Paintings
Can Koc, Chris Bakan, CJ Donahoe, Opeyemi Olanipekun
We present CellViT, a vision transformer trained on cell painting assays to perform classification on different types of treatments. We show that our model reaches SOTA and can accurately predict 14 types of different genetic and chemical treatments on cells. Furthermore, we share our dataset and full model and weights on hugginface to help accelerate therapeutic target & biomarker discovery efforts in drug development.
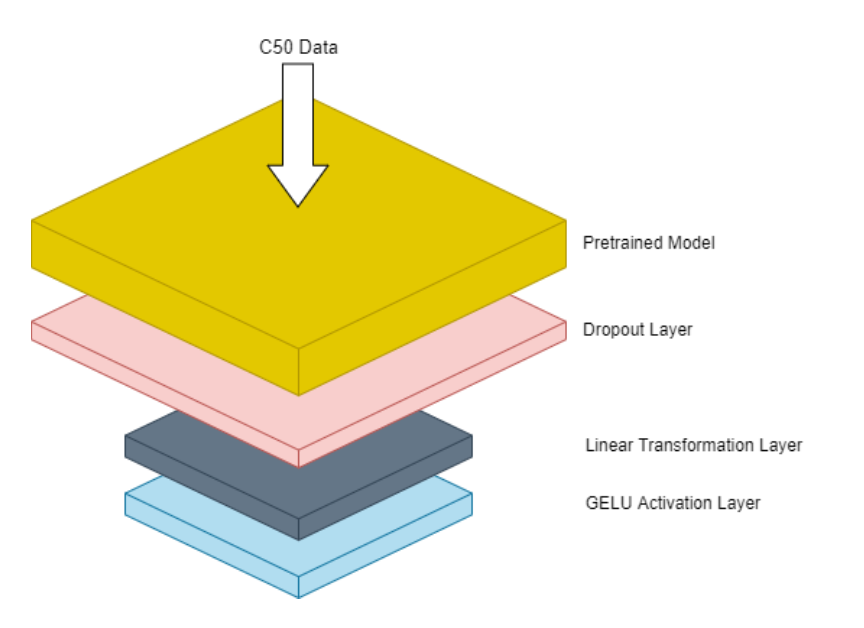
Authorship Identification in News Articles using Transformers
Can Koc*, Joshua Dunn*
Fine-tuned pre-trained BERT transformer models to authorship identification task on the Reuters C50 dataset. We show that without access to significant resources, relying on single Tesla P100 GPU with 15.9 GiB memory, we are able to achieve sufficiently large accuracies using transformers and beat previous baseline article level GRU and LSTM based approaches.